Context & Motivation
Combat robotics is an extreme engineering stress test where mechanical failure is guaranteed without rigorous design. "Insaniti" was a 3lb (Beetleweight) entry designed to compete in the highly destructive RoboJackets internal tournament and Motorama 2022. Following the team's standard design methodology (Research → Sketch → CAD → Sim → Build), the goal was to survive 3 minutes in the arena while delivering catastrophic kinetic energy to opponents.
Design Requirements
Designing for the 3lb Beetleweight class requires strict mass budgeting while maximizing offensive output. The core design objectives were:
- Kinetic Energy: Deliver catastrophic energy (> 2kJ) to disable opponents in a single hit.
- Spin-Up Time: Achieve operational speed (67%) in < 2 seconds to allow for rapid counter-attacks.
- Survivability: Withstand high-g environment and direct impacts from rival horizontal spinners.
Weapon System Design
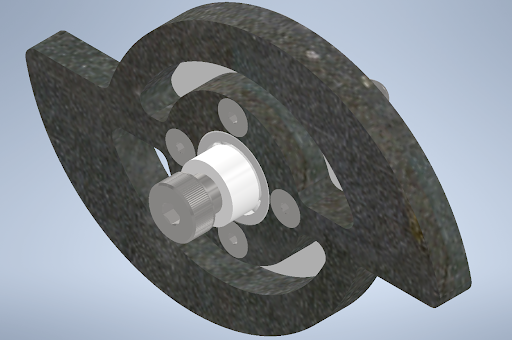
The robot was designed around its primary weapon: a vertical, asymmetrical drummer spinner.
Mechanical Architecture
Following standard combat robot material guidelines, we utilized a mix of materials optimized for their specific roles:
- Striking Surface (Steel): S7 Tool Steel was selected for the weapon body. As per standard practice for high-stress striking components, steel provides the necessary hardness and density to resist deformation during impact rather than absorbing it.
- Rotational Assembly: The distinct "drum" consists of the steel weapon bolted to a custom Aluminum 6061-T6 pulley. Aluminum was chosen here to reduce rotational mass in non-striking areas while maintaining sufficient structural strength.
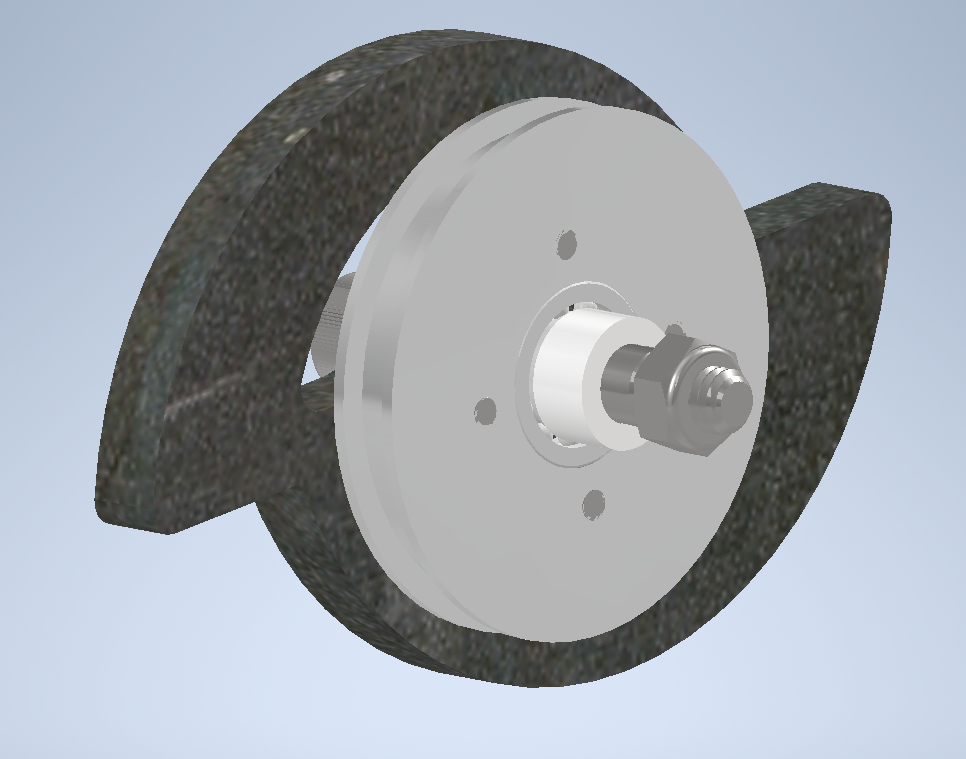
Weapon Assembly Bill of Materials
| Tool Steel Weapon | 0.759 lbs |
| Aluminum Pulley (2.5") | 2.25" Groove |
| x2 Ball Bearings | 7/8" OD |
| SS Shoulder Screw (Axle) | 3/8" Dia |
| Total Assembly Mass | 1.052 lbs |
| Moment of Inertia | 1.847 lb/in² |
Motor Selection & Dynamics Simulation
While basic motor selection often relies on static equations (e.g., RPM = KV * V and t = 3 * J * ω / τ), these approximations fail to account for current limiting and voltage sag. To properly size the motor, I developed a custom MATLAB simulation using a Forward Euler integration method. This allowed us to match the motor's torque curve to the weapon's massive Moment of Inertia (1.85 lb/in²).
Torque: τ = Ki * i(t)
Accel: α(t) = (1/J) * (τ - D*ω(t))
Update: ω(t+dt) = ω(t) + α(t)*dt
- Motor: Scorpion SII-3020-1110KV (Brushless)
- Reduction: 1.6:1 Timing Belt Drive
- Geometry: 1.125" (Weapon Rad) : 0.7" (Motor Rad)
Simulated Performance
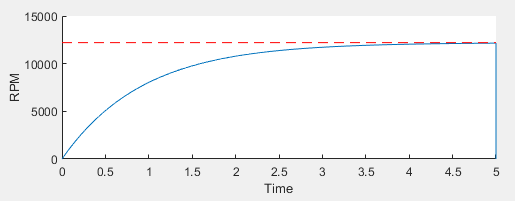
MATLAB Output: Angular Velocity vs. Time
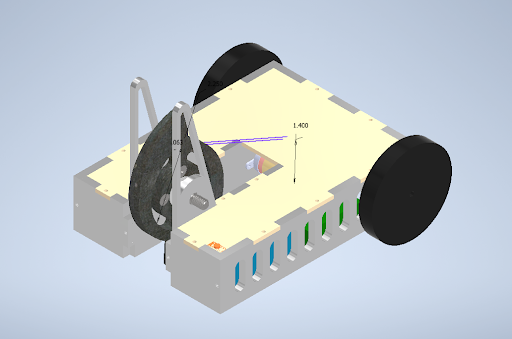
Chassis & Structural Design
The chassis serves two roles: structural armor against incoming attacks and a mounting point for the intricate electronics.

Hybrid Armor Architecture
The chassis design follows the "Frame and Armor" philosophy to balance rigidity and toughness:
- Skeleton (Rigidity): CNC-machined 3/16" Aluminum (Side Plates) and 1/8" Aluminum (Front/Back/Base) provided the rigid internal structure necessary for precise bearing alignment and motor mounting.
- Armor (Energy Dissipation): The top plate utilized 1/8" HDPE (High-Density Polyethylene). Unlike brittle metals, HDPE dissipates kinetic energy by tearing and deforming ("gouging") rather than transferring the full shock impulse to the frame, effectively "bouncing" glancing blows.
- Invertibility: Extended "ears" on the internal plates were designed to allow the robot to drive even when flipped upside down.
Drive Train
Locomotion is provided by 2 independent drive motors coupled to 3" diameter foam wheels.
- Motors: x2 Brushed Drive Motors (0.161 lbs each)
- Mounting: x2 Aluminum Brackets (~0.1 lbs)
Total System Mass Budget
| Sub-System | Components | Mass |
|---|---|---|
| Chassis Structure |
2x Side (3/16" Al), 2x Front/Back/Base (1/8" Al) 1x Top (1/8" HDPE), 2x Internal (1/8" Al) | ~1.23 lbs |
| Electronics | Drive Motors, Wheels, ESCs, Battery, Receiver, Switch | 0.519 lbs |
| Weapon System | Motor, ESC, Pulley, Weapon, Hardware | 1.05 lbs |
| TOTAL WEIGHT | ~2.8 lbs |
Performance Analysis & Lessons Learned
At Motorama 2022, Insaniti faced significant challenges, ending with a 0-2 record. While the chassis and armor performed to spec, critical sub-system failures highlighted the importance of robust electronics integration.
Critical Failure Modes
- Electrical System: The master switch was stripped due to poor mechanical support (held only by wires), leading to a total loss of power in the Battle Box against Carrotz and Mombot.
- Weapon Drive: The decision to omit a belt tensioner caused the weapon belt to slip under load. Non-adjustable motor mounts meant we could not re-tension the system in the pits.
- Traction: 3" foam wheels struggled to find grip on the arena floor, and the aluminum invertibility stand added excessive friction when driving inverted.
Design Validations
- Survivability: Despite the losses, the HDPE top plate and 1/8" Aluminum base successfully absorbed heavy hits from Chonkii and Mauri in testing without structural failure.
- Manufacturability: The "Long Prismatic" chassis design proved extremely easy to machine, validating the decision to avoid complex internal geometry for a V1 prototype.
- Key Takeaway: "Rigorous design" must extend beyond the chassis—wire strain relief and serviceability (adjustable mounts) are just as critical as armor thickness.