Context & Motivation
In modern robotic surgery, sub-millimeter precision is a requirement for performing any surgical tasks. Within my "Computer Integrated Surgery" course, we focused on building the registration system for stereotactic navigation from scratch. This project addresses the critical "interventional loops" of tracking, calibration, registration, and error correction, calibrating preoperative imaging data to the surgical OR workspace.
System Architecture
Mathematical Implementation
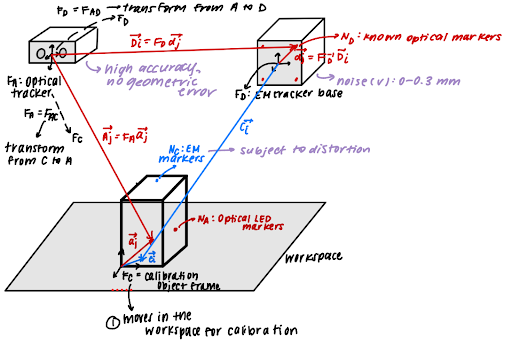
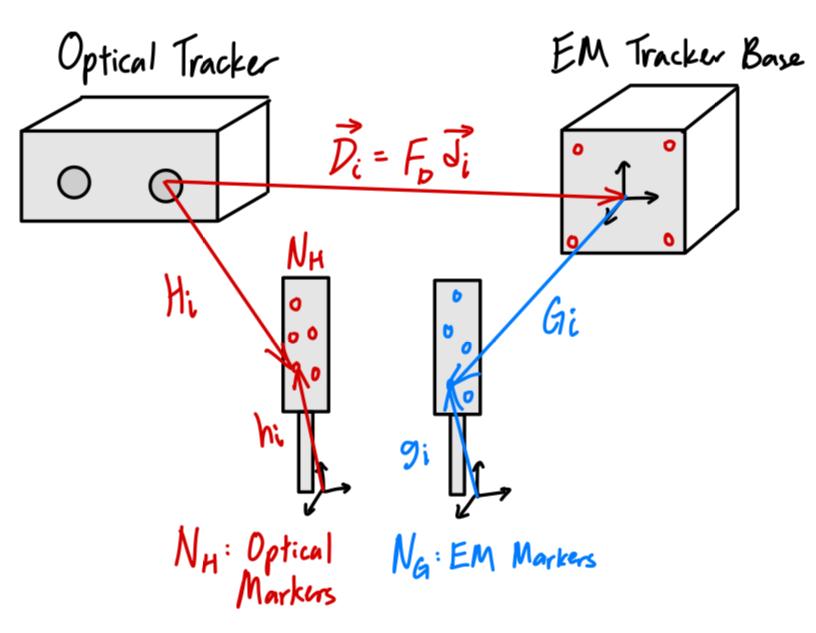
The system relies on rigorous linear algebra and computational geometry principles to map between the Calibration Frame (), Optical Tracker Frame (), and EM Tracker Frame ().
1. Rigid Body Registration (Arun's Method)
To align the coordinate systems, we implemented a 3D Point Set Registration algorithm.
Algorithm Steps:
- Centroid Alignment: Compute centroids , and center the points to remove translation.
- SVD: Compute the cross-covariance matrix and its Singular Value Decomposition .
- Rotation: solve . We ensure to prevent reflection artifacts.
- Translation: Recalculate .
Registration Reference Frames
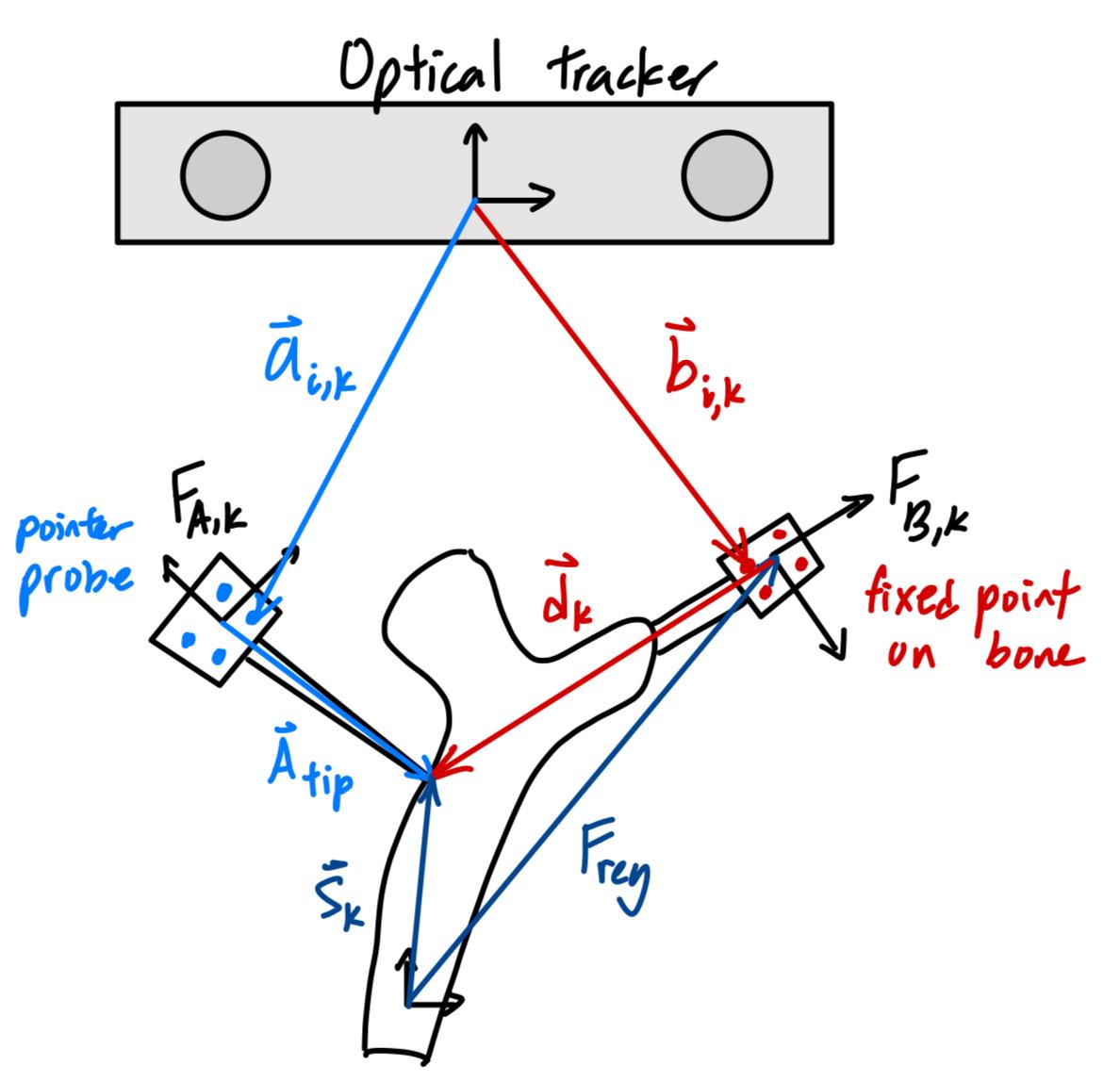
2. Pivot Calibration
We solve for the unknown tool tip offset and the fixed pivot point by treating it as a linear least-squares problem:
By stacking matrices for frames, we solve using the lsqr method to find the 6-unknowns (3 for tip, 3 for pivot).
3. Distortion Correction (Bernstein Polynomials)
Electromagnetic tracking is susceptible to field distortion. We implemented a 5th-order 3D Bernstein polynomial correction map. This required solving for 216 coefficients () to map distorted EM readings back to the ground-truth optical space.
.jpg)
Algorithmic Modules
Iterative Closest Point (ICP)
For surface registration, we implemented a Generalized ICP algorithm with anisotropic covariance weighting. This improved convergence speed by 50% (11.0s vs 37.2s) compared to standard point-to-point ICP.
Covariance Trees
To support real-time interaction with high-res anatomical meshes, we constructed spatial search trees (Covariance Trees). This reduced closest-point query complexity from linear to logarithmic .
Performance & Results
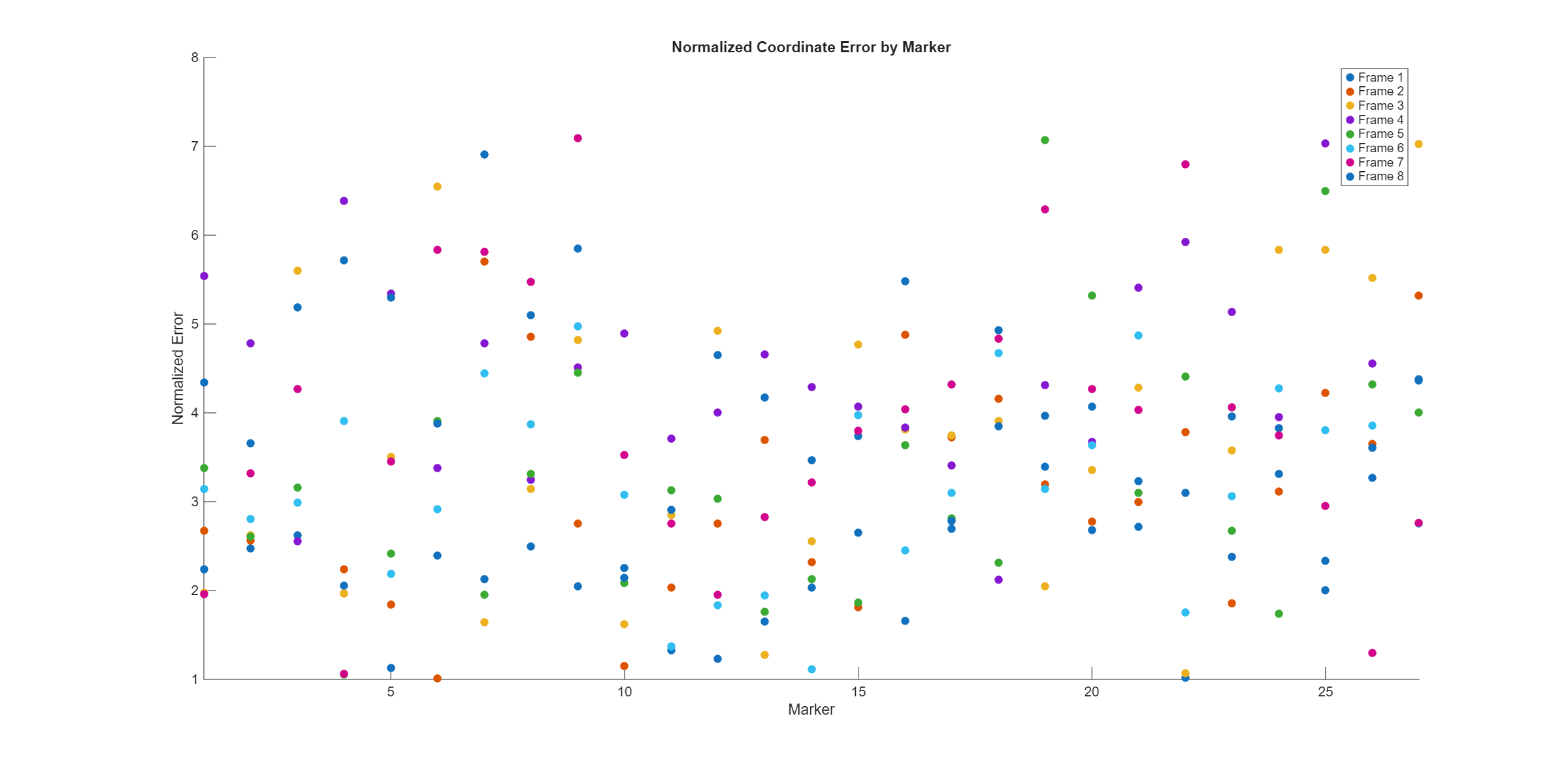
Error Analysis & Robustness
We validated the system against three noise models to quantify registration error. The Bernstein Polynomial correction was critical in mitigating the >3mm error introduced by EM field distortion.
| Noise Condition | Mean Diff Norm (mm) | Max Diff Norm (mm) | Impact |
|---|---|---|---|
| Baseline (None) | 0.00 | 0.01 | Ideal |
| Optical Tracker Jiggle | 0.01 | 0.03 | Negligible |
| EM Noise | 0.46 | 0.79 | Minor |
| EM Distortion | 3.51 | 7.09 | Critical (Requires Correction) |
| With Correction | < 0.50 | ~ 1.10 | Clinical Standard Met |
- Registration Accuracy: The unit tests confirmed rotation and translation recovery errors .
- Search Efficiency: Covariance Trees reduced point-to-mesh query times from linear to logarithmic .