Context & Motivation
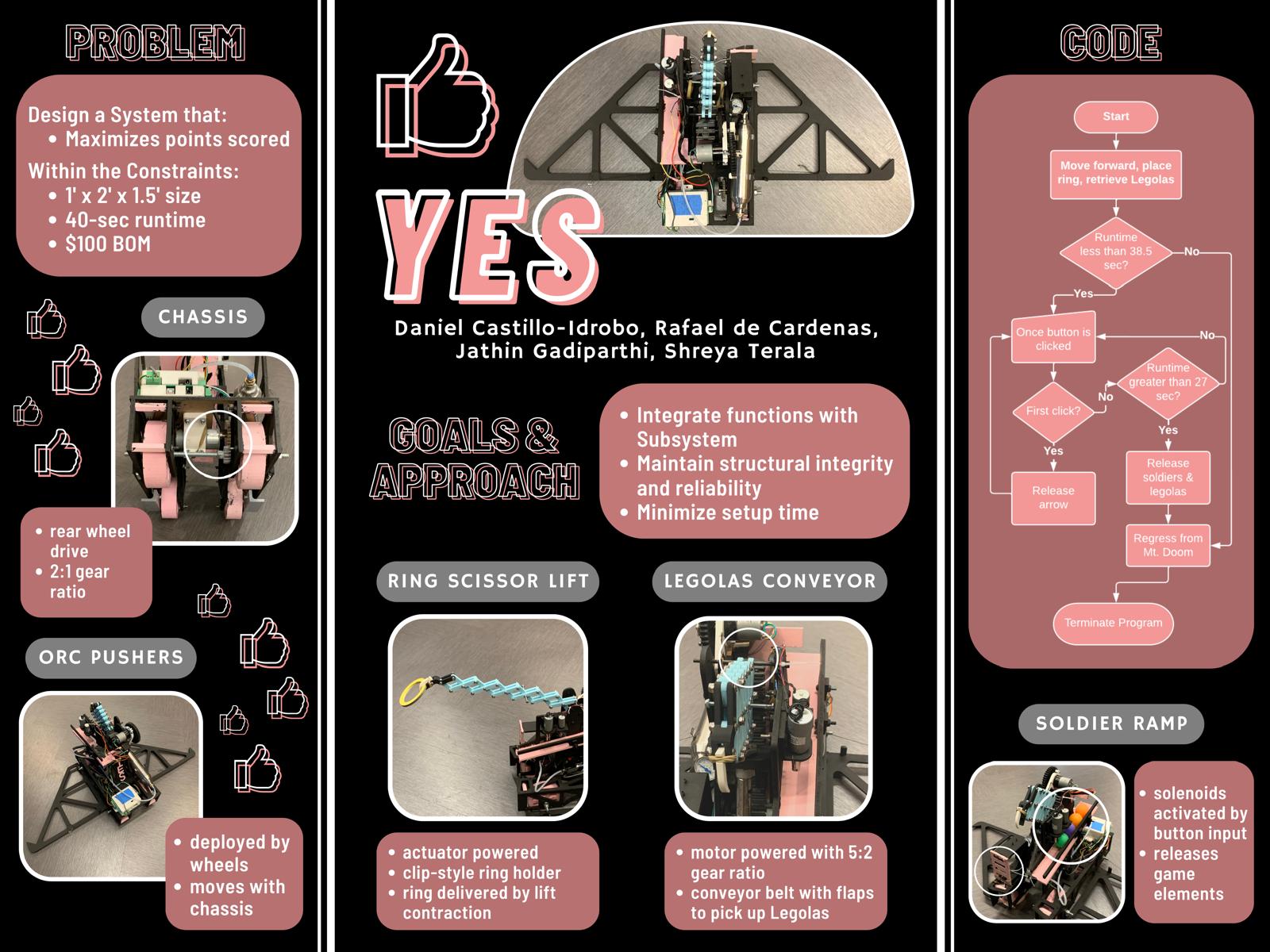
For the ME 2110 "Lord of the Rings" design challenge, we were tasked with building an autonomous robot to complete a complex set of tasks within 40 seconds. The machine had to fit within a 12"x24"x18" volume, strictly adhere to a $100 budget, and integrate multiple electromechanical subsystems to score points.
Mission Objectives
- Ring Placement (High Priority): Extend upwards to place a ring on "Mt. Doom" (31/16" height).
- Orc Defense: Deploy barriers to push enemy "Orc" blocks into the opposing zone.
- Troop Deployment: Transport and release "Soldier" figurines and a red arrow into specific battle stations.
- Legolas Rescue: Autonomous retrieval of the "Legolas" ball from a moving platform.
System Architecture
We prioritized a reliability-first design philosophy, focusing on structural rigidity and the seamless integration of five distinct subsystems.
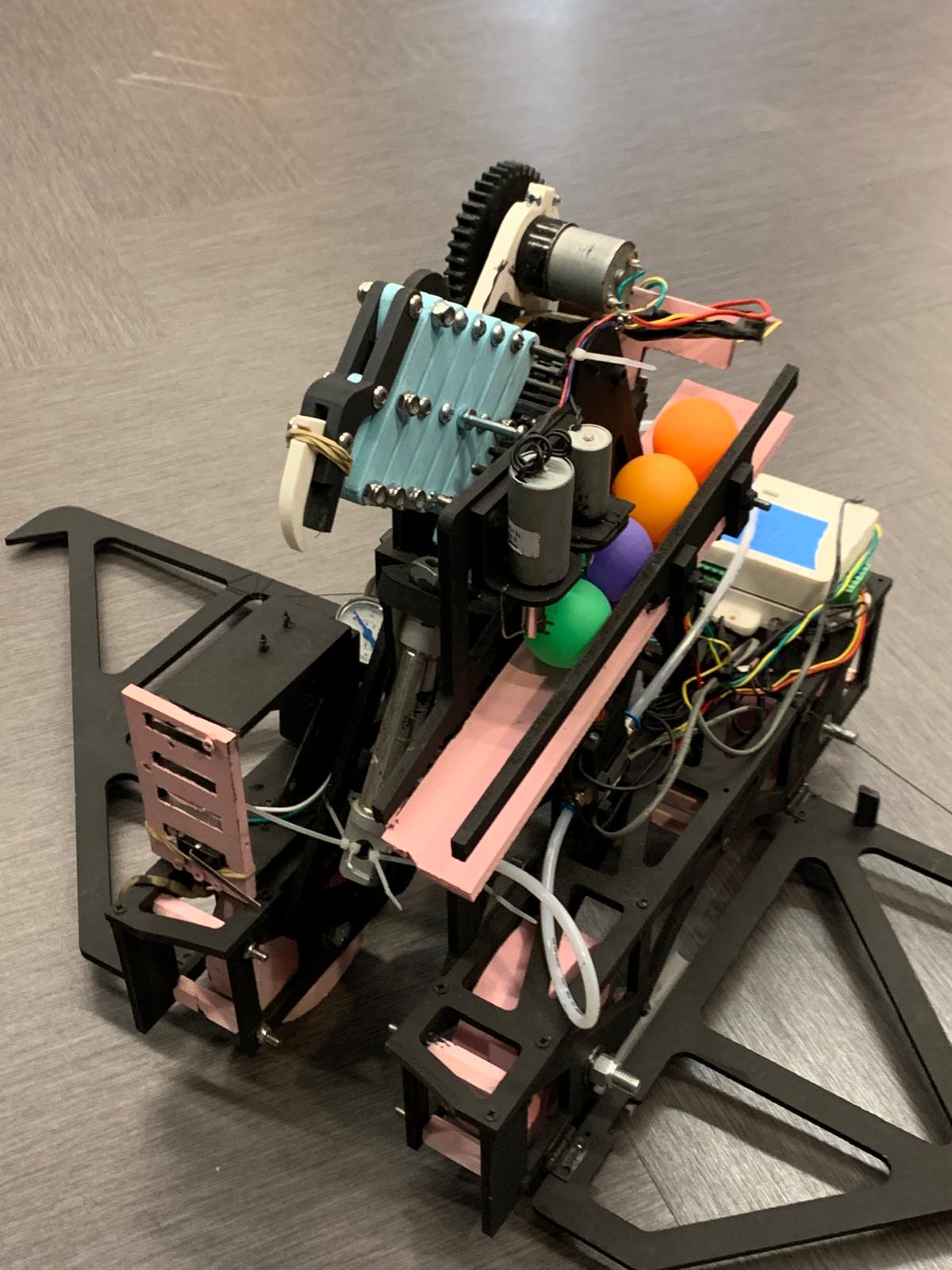
Robot Configuration (Front View)
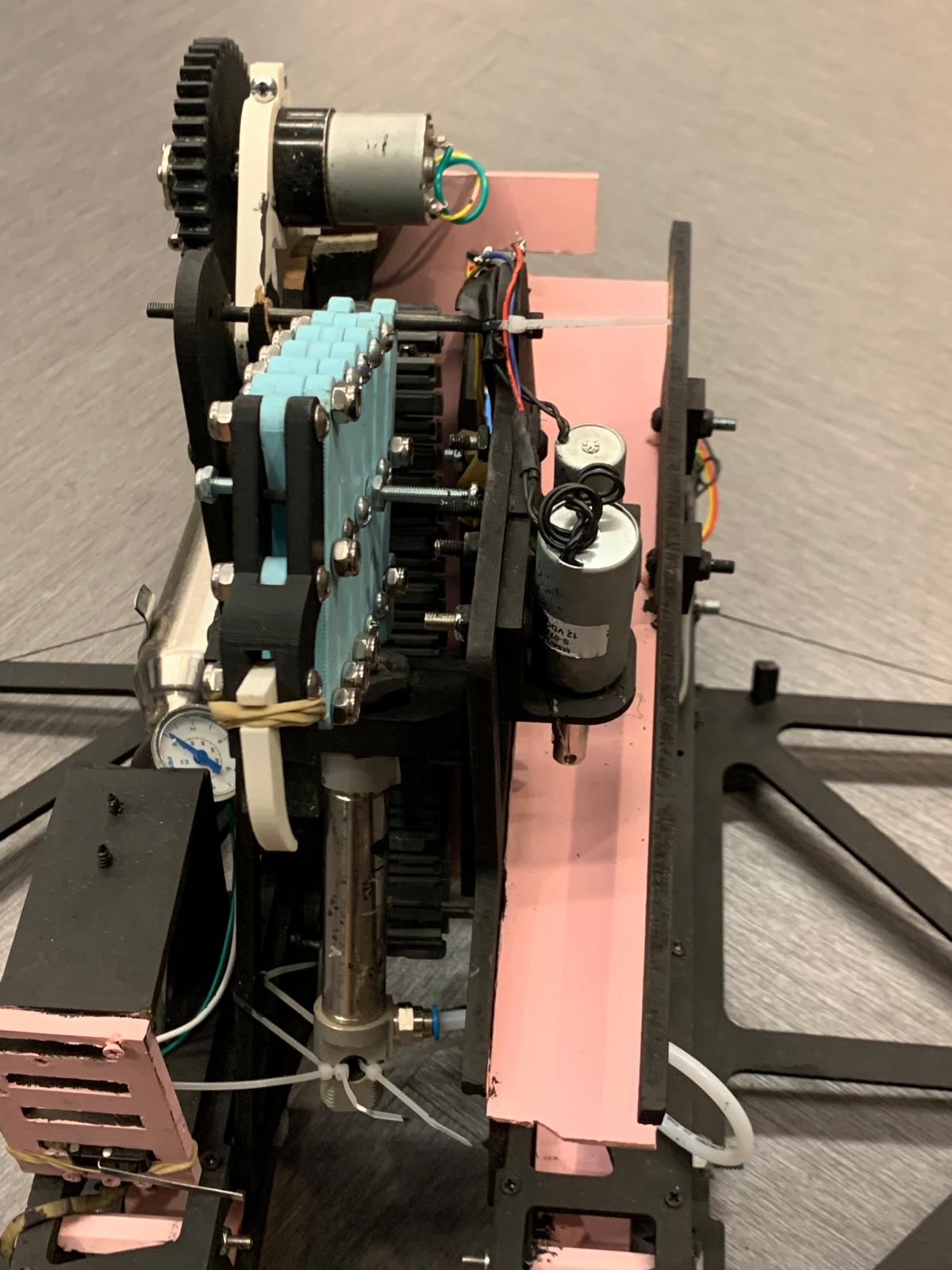
Drivetrain & Electronics Integration
Engineering Implementation
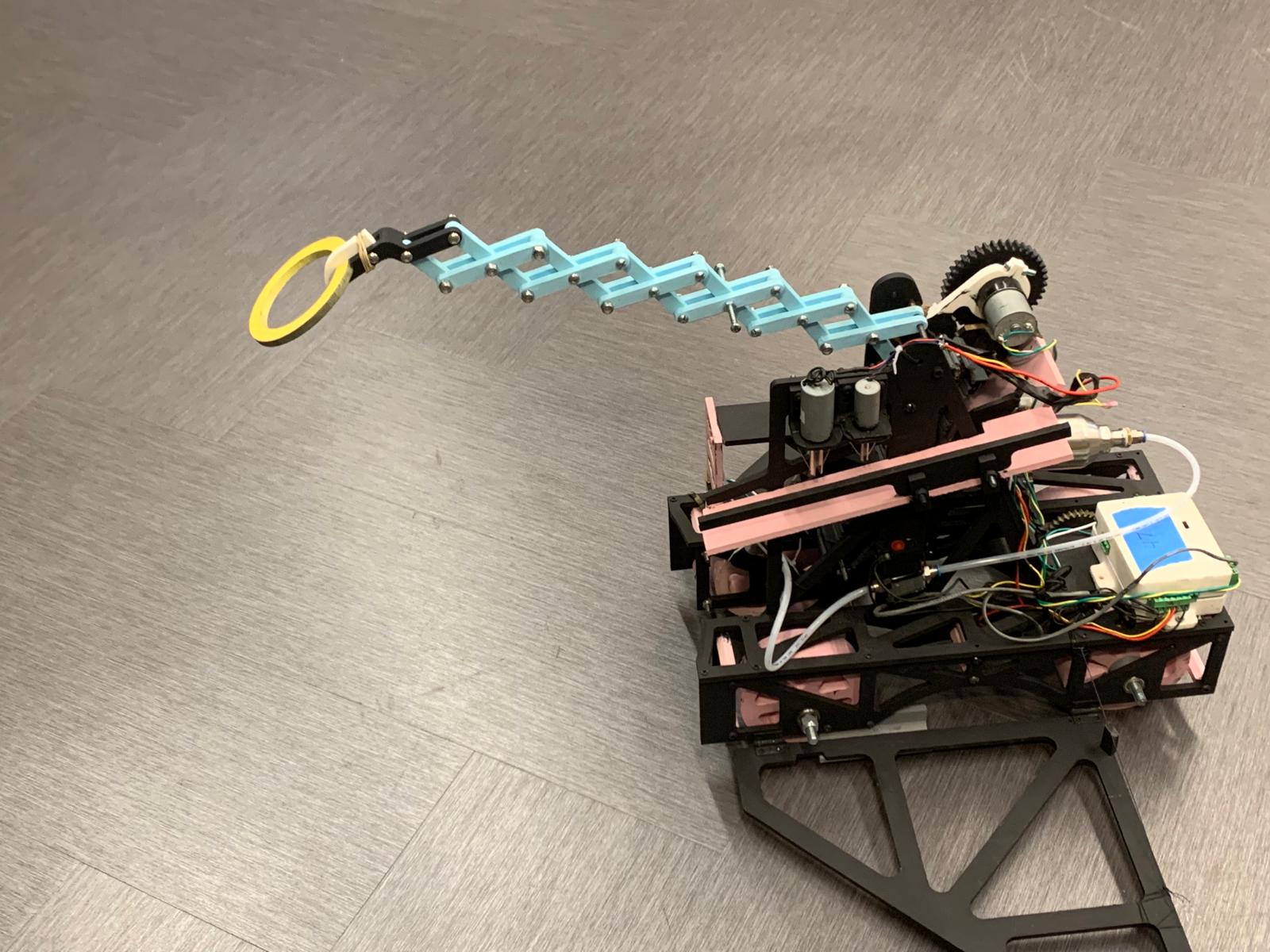
1. Pneumatic Scissor Lift (Ring Placement)
To reach the 31-inch target height of "Mt. Doom" within the size constraints, we engineered a six-stage pneumatic scissor lift.
- Actuation: Powered by a single pneumatic piston, ensuring a consistent and purely mechanical extension every time.
- Stability: Constructed from reinforced beams with bolt joints to minimize lateral sway during the 2-second deployment window.
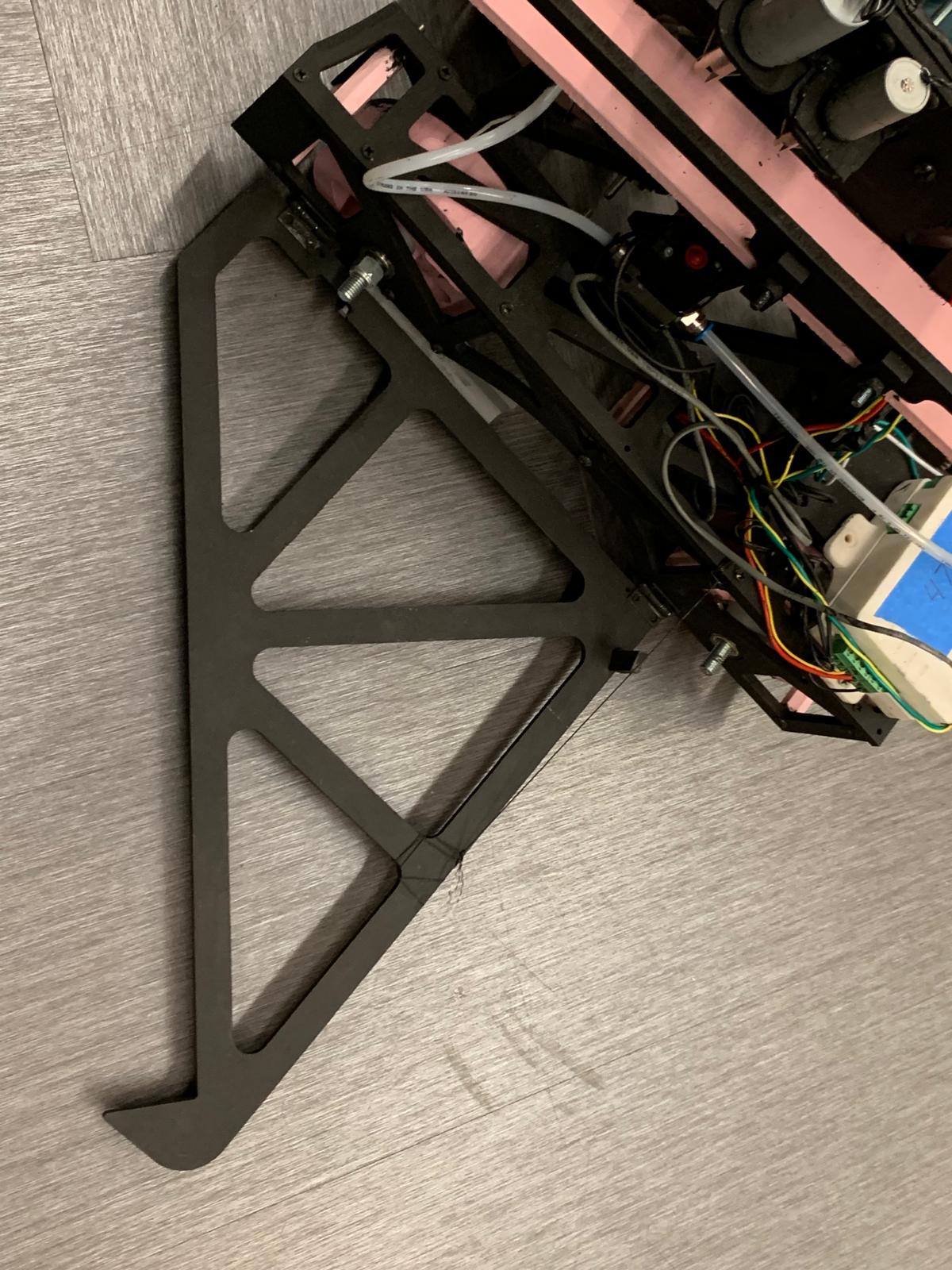
2. Gravity-Fed Wing Deployment (Orc Defense)
We avoided using extra motors for the defensive "wings" by integrating their deployment with the drivetrain.
- Mechanism: Large MDF wings were hinged to the chassis side. A small extrusion on the wheel hubs "nudged" the wings open as the robot drove forward, allowing gravity to lock them into full extension.
- Result: Effectively cleared "Orc" blocks from our zone without consuming electrical power.
3. Solenoid Ramp & Conveyor
We integrated the troop deployment and rescue systems to save space:
- Solenoid Ramp: A gravity-fed ramp controlled by two linear solenoids released the "Red Arrow" and "Soldiers" at precise timing intervals.
- Legolas Conveyor: Positioned directly above the pick-up zone, this belt drive used friction flaps to scoop the "Legolas" ball and deposit it into the soldier ramp for simultaneous deployment.
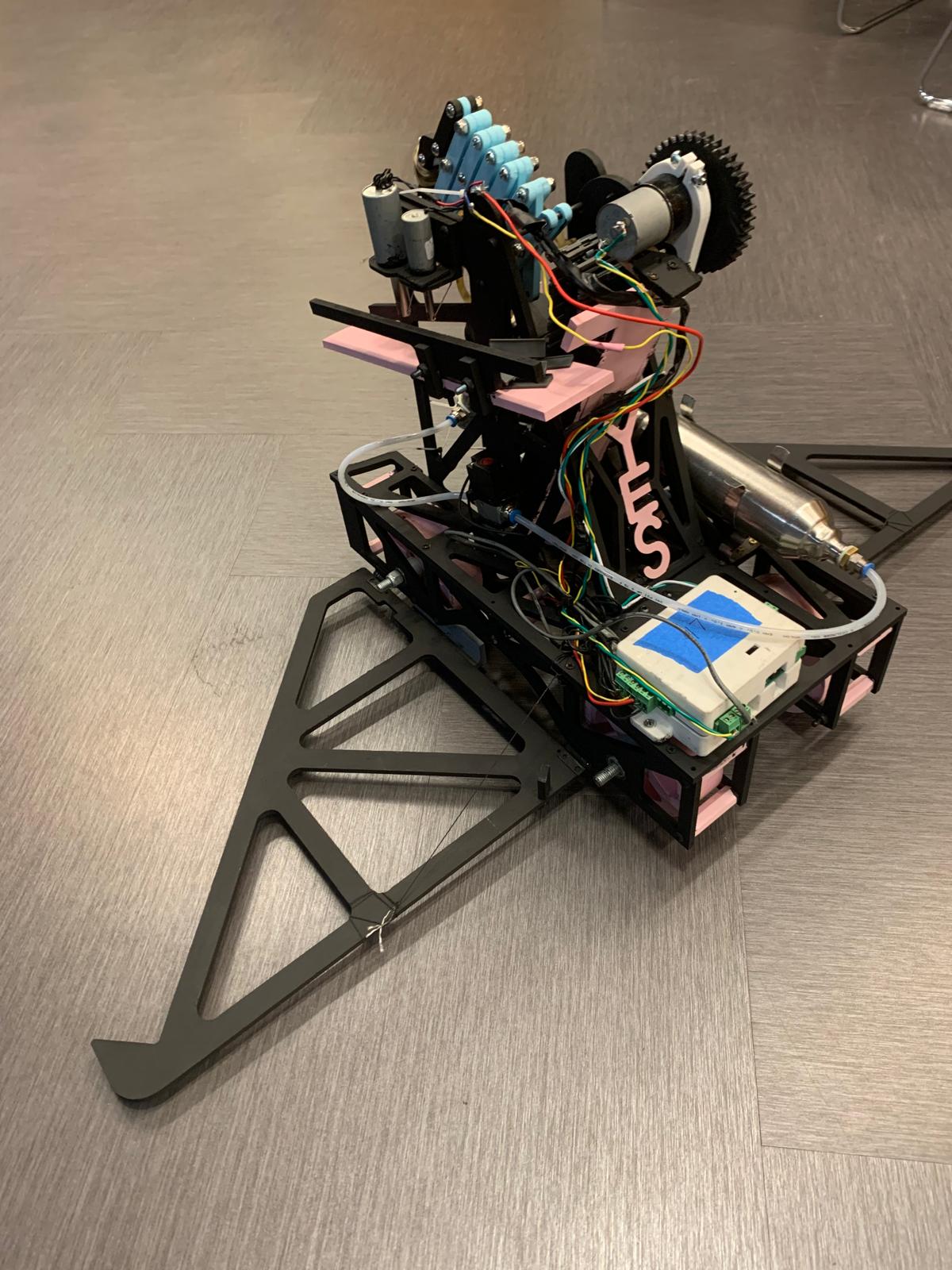
4. Button Platform & Drivetrain
The robot featured a custom Multi-Height Button Platform to interface with the varying heights of the battle stations. The drivetrain used a U-shaped 4-wheel configuration with a dedicated rear steering wheel for precise alignment.
Video: Autonomous Deployment in Testing
Performance & Results
The system was iteratively tested through two design sprints. In the final competition, the robot demonstrated high reliability:
- Consistency: Successfully scored the Ring on Mt. Doom before any opponent in the final matches.
- Defense: The passive wing system consistently cleared the "Orc" zone, securing defensive points.
- Outcome: In the final game, the robot was on track to outscore all three opponents (projected 740 points) but faced a disqualification due to a logic error that caused movement after the buzzer.
Competition Project Poster